Anyone who has worked on the front lines of the drone industry knows this routine all too well: The drone finishes its data collection, lands, you pull out the memory card, copy tens of gigabytes of images to a workstation, then run processing, correction, and stitching.
Fly for an hour, wait a day for the map. Emergency command can’t wait that long, reconnaissance intelligence can’t wait, and engineering decisions can’t wait either. The problem isn’t that ground processing is slow; it’s that during the entire flight, the data is completely silent.
What the ICE CYPRESS DroneSwarm Real-time Online Analysis System changes is precisely this timeline: it moves the computing power onto the aircraft, enabling drones to generate orthomosaic maps while they are still capturing images.
From Batch Processing to Stream Processing
The traditional approach is batch processing—all photos are taken, then sent back to the ground together for processing. DroneSwarm, however, uses stream processing, handling each frame the moment it is captured.
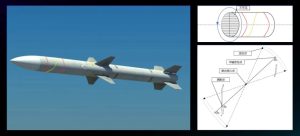
At its core is a pipeline architecture based on ROS. Each aerial image, along with its GNSS positioning data, enters the pipeline. A visual SLAM algorithm estimates the precise pose (position and orientation) of the camera at every moment during flight. The system then uses this pose positionx to “paste” the image content onto the correct geographic location.

This “pasting” first requires orthorectification—eliminating perspective distortion and correcting the oblique image to a true vertical (nadir) view. The rectified image is like a puzzle piece, incrementally integrated into a global grid. The process repeats with the next frame.
New frames keep coming, and the puzzle keeps growing. The orthomosaic you see on the screen is stitched together precisely in this frame-by-frame manner.
Because the geo-referencing and orthorectification of each frame are completed onboard, what is transmitted back is the finished map tile, not the raw data. This reduces the data link load to 1% of that required by traditional methods. For emergency response teams and military units that must operate in communication-constrained environments, this figure directly determines whether the system is usable or not.

When Vision Fails, We Have A Safety Net Engages
Visual SLAM has a natural limitation: it loses tracking when encountering featureless surfaces like water, snow, or large areas of uniform texture.
Vast water bodies after floods, sandy expanses in the Gobi Desert—these are precisely the high-frequency scenarios for emergency and reconnaissance missions.
DroneSwarm’s approach is intelligent switching: when visual positioning becomes unreliable, it immediately switches to GNSS combined with magnetic heading estimation, using satellites and orientation sensors to maintain positioning. No mission interruption is required, and no human intervention is needed.
Multi-Drone Parallel Processing: The Architecture is Key
Moving computing power onto a single drone solves the “waiting” problem. A more challenging issue is multiple drones operating simultaneously: should computing power be centralized at the ground station or distributed to each aircraft?
In traditional solutions, no matter how many drones are deployed, map processing converges on the same ground workstation. More drones mean longer queues on the ground.
DroneSwarm’s choice is to deploy the entire processing pipeline onto every aircraft participating in the mission. Each drone runs its own SLAM positioning, orthorectification, and local map stitching. The ground station does only one thing: seamlessly merging the multiple map tiles.

The value of this architecture becomes apparent in missions requiring large-area coverage or rapid response. Fixed-wing drones cover wide-area search, multi-rotors move in to confirm key targets—a heterogeneous swarm conducts parallel collection and processing in the same airspace, with the ground station merging the results in real time.
Over 30 sorties can be deployed in under 1 minute, with dynamic routes featuring automatic collision avoidance and optimization of overlap and coverage density. For frontline decision-makers, multi-drone parallelism means obtaining a more complete situational map of the same operational area in a shorter time.
Recognition is Not the Goal, Positioning Is
Another value of onboard processing is the forward-deployed perception (感知前置).
The system runs target detection algorithms synchronously during flight, achieving over 90% recognition rates for time-sensitive targets like vehicles and personnel.
But mere recognition is not enough—what’s valuable is simultaneously providing precise coordinates.
By combining the real-time pose from SLAM with the target’s position in the image frame, the system directly calculates geographic coordinates, achieving sub-meter positioning accuracy. Target ID, type, coordinates, and a thumbnail are pushed to the ground station while the drone is still flying.
There is zero wait time from detecting a target in the air to having actionable coordinates on the ground.
For key targets requiring detailed analysis, the system supports having a drone orbit and capture multi-angle imagery. The onboard system generates a dense point cloud in real-time and transmits it back, completing a 3D reconstruction in rapid mode within 8 minutes.

For building damage analysis in disaster assessment or facility identification in tactical reconnaissance—a map lets you see the outline, but a 3D model allows you to interpret the structure. This represents two different levels of data value.
Changing from batch processing to stream processing, from single-file queuing to multi-drone parallelism. For frontline operators, all these technical maneuvers boil down to one simple idea:
When the flight ends, the information you need is already in your hand.